Методичні вказівки до лабораторної роботи вимір зусиль і деформацій з використанням тензорезисторних перетворювачів
|
Скачати 42.75 Kb.
|
|
| Дата конвертації | 25.01.2019 |
| Розмір | 42.75 Kb. |
| Тип | навчальний посібник |
|
|
-
Навігація по даній сторінці:
- 1. Мета роботи, її короткий зміст
- 2. Основні відомості про тензорезисторами
- 3.Оборудование, що використовується при виконанні лабораторної роботи.
- 4.Методика проведення роботи і обробки результатів експерименту
- 5. Вимоги до техніки безпеки при виконанні лабораторної роботи
- 6. Вимоги до звіту
- 7. Питання для підготовки до захисту лабораторної роботи
|
Міністерство вищої і середньої спеціальної освіти РФ МОСКОВСЬКИЙ ІНСТИТУТ електроніки І МАТЕМАТИКИ МЕТОДИЧНІ ВКАЗІВКИ до лабораторної роботи вимір зусиль і деформацій з використанням тензорезисторних перетворювачів Факультет електронної техніки Кафедра метрології радіоелектронної техніки Москва - 2004 Методичні вказівки до лабораторної роботи "ВИМІР ЗУСИЛЬ І Деформації З ВИКОРИСТАННЯМ тензорезисторний ПЕРЕТВОРЮВАЧІВ" з дисциплін "Вимірювальні перетворювачі" і "Інформаційно-вимірювальна техніка", що вивчається студентами П і У курсів спеціальностей 0642 і 0567 відповідно. Лабораторна робота виконується в обсязі 4-х годин. Основним змістом рабом є вивчення принципу дії та конструкції тензорезисторів і оволодіння практичними навичками роботи з сучасними тензометричними установками при вимірюванні сил і деформацій в елементах конструкцій. редактор С.Л.Клишінская Техн.редактор О.Г.Завьялова Підписано до друку 14.01.88 Формат 60x84 1/16 Обсяг 1,36 печ.л. Уч.-ізд.л. 1,32 Тираж 50 прим. Вид. № 229 Замовлення - 73 Безкоштовно МІЕМ, 109028, Москва, Б.Вузовскій пров., 3/12 Ротапринт МІЕМ, 113054, Москва, М.Піонерская, 12 © Московський інститут електроніки та математики, 1988. 1. Мета роботи, її короткий зміст 1.1. Метою цієї робота є вивчення принципу дії тензорезисторних перетворювачів і набуття практичних навичок роботи з тензометричної установкою, призначеної для вимірювання механічних сил і деформацій. 1.2. В процесі виконання роботи студенти збирають електричну схему тензометричної установки, визначають її градуювальну характеристику, а потім визначають невідомі ваги і маси деталей. 2. Основні відомості про тензорезисторами В основі принципу дії тензорезисторів лежить явище тензоеффекта, що полягає в зміні електричного опору провідників і напівпровідників при їх механічній деформації. Опір R резистора, виконаного у вигляді дроту довжиною l, визначається відомим виразом.
де r - питомий опір матеріалу дроту; S - площа поперечного перерізу дроту. Диференціюючи вираз (1) і переходячи до кінцевих приращениям, отримаємо, що поздовжньої пружної деформації дроту відповідає відносне зміна її опору
де D R, D r, D S - абсолютні збільшення опору, питомого опору, довжини і площі поперечного опору провідника відповідно. У твердому тілі в зоні пружних деформацій величини поперечних і поздовжніх деформацій пов'язані виразом
де
в - поперечний розмір провідника; m - коефіцієнт Пуассона. З урахуванням виразів (2) і (4) величина відносного зміни провідника діаметром d і довжиною l.
Якість тензорезистора визначається його коефіцієнтом тензочутливості K і величиною температурного коефіцієнта опору / ТКС /
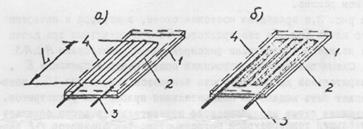
Чим вище коефіцієнт тензочутливості К і менше температурний коефіцієнт опору (ТКС) матеріалу, з якого виготовлений тензорезистор, тим вище його якість. Найчастіше дротові тензорезистори виготовляються зі сплавів константан і манганин, у яких К »2 і ТКС = ± 30 * 10 -6 K -1 і ± 10 * 10 -6 K - 1 відповідно. Якщо покласти в (5), що Пристрій найбільш поширеного типу наклеюється дротяного тензорезистора зображено на мал.1, а. На смужку тонкого паперу або лакової плівки 1 наклеюється так звана решітка з зигзагоподібно покладеної тонкого дроту 2 діаметром 0,02 - 0,05 мм. До кінців дроту приєднуються (пайкою або зварюванням) вивідні мідні провідники 3. Після висихання шару клею зверху перетворювач покривається захисним шаром лаку 4. Якщо такий перетворювач наклеїти на поверхню випробуваної деталі, то він буде сприймати деформації її поверхневого шару. Вимірювальної базою перетворювача є довжина деталі, яку займає дротом. Найбільш часто використовуються дротові перетворювачі з базами 5-20 мм, що володіють опором 50-500 Ом.
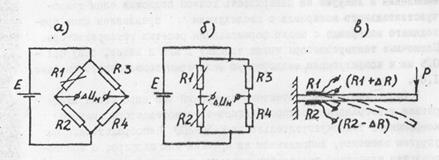
Рис.1. Конструкції тензорезисторних перетворювачів Тензопреобразователь з гратами з фольги (рис.1, б) виходять шляхом хімічного травлення фольги 2 товщиною 4 ~ 12 мкм, нанесеної суцільним шаром на поверхню підкладки 1из непровідного матеріалу. Фольгові перетворювачі мають менші габарити, ніж звичайні дротові і можуть мати базу L 0,5-5 мм. Металеві плівкові тензорезистори виготовляються шляхом напилення в вакуумі на поверхню тонкої підкладки шару тензо-чутливого матеріалу з подальшим травленням шару провідного матеріалу з метою формування решітки тензорезистора. Плівкові тензорезистори мають товщину 1 мкм і менше, базу 0,1-0,5 мм і конфігурацію, аналогічну фольговим тензорезисторами (рис. 1, б). В даний час в практику вимірювань все ширше стали впроваджуватися інтегральні напівпровідникові тензорезистори мають коефіцієнт тензочутливості К »50-200. Безпосередньо па пружному елементі, виконаному з кремнію або салфіра, з використанням планарной технології мікроелектроніки формується тензорезистор з монокристалічного кремнію. Такі тензорезістори забезпечують більшу точність перетворення, ніж плівкові або фольгові, оскільки між поверхнею пружного елемента і гратами тензорезистора відсутня шар клею, що є джерелом похибок при передачі деформацій від пружного елемента до тензорезисторами. Найбільш поширеною вимірювальної метою для тензорезисторів є бруківка вимірювальна схема, що працює в нерівноважному режимі. На рис.2, а приведена бруківка схема, в якій в якості одного плеча включений тензорезистор R1, а решта три плеча моста є постійними фіксованими резисторами R2, R3, R4. Схема живиться від джерела постійної напруги Е. З вимірювальної діагоналі моста знімається напруга U M, яке може бути подано на вимірювальний прилад або реєстратор. Наведена схема неравновесного вимірювального моста має значну температурної похибкою. Тензорезистор R1 розташовується безпосередньо на об'єкті вимірювання, а резистори R2, R3, R4 - в блоці вторинної апаратури, що містить підсилювачі, блоки живлення, показують прилади, віддаленому від об'єкта вимірювання і знаходяться в інших кліматичних умовах. При зміні температури поверхні об'єкта вимірювання буде змінюватися опір тензорезистора R1, що. призведе до зміни вихідної напруги U Н мостової схеми при відсутності пружної деформації решітки тензорезистора.
Рис.2. Схеми включення тензорезисторов При диференціальному включенні двох ідентичних тензорезисторів R1 і R2 в два сусідніх плеча моста (рис. 2, б) вдається знизити температурну похибку нуля в 10-20 разів у порівнянні з попередньою схемою включення. Приклад фізичної реалізації диференціальної мостової схеми вимірювання представлений на рис.2, в. На поверхні консольно закріпленої пружною, балки 1 наклеєні тензорезистори R1 і R2, які включені в якості плечей мостової вимірювальної схеми і має рівні опору (R1 = R2). При рівності опорів двох інших плечей моста (R3 і R4) вихідний сигнал з вимірювальної діагоналі моста дорівнює нулю (D U M = 0). При впливі на кінець консольної балки вимірюваного зусилля Р¹0 балка прогнеться (див. Пунктирне зображення балки на рис.2, в), що призведе до появи пружних деформацій і напружень розтягу на верхній поверхні балки і напружень стиску на нижній її поверхні. Пружні деформації балки будуть сприйняті наклеєними тензорезисторами і їх опору зміняться відповідно до значень R1 + D R і R2- D R (рис.2, б і 2, в). При цьому на виході мостової схеми з'явиться напруга DU M функціонально пов'язане з вимірюваним зусиллям Р. При ідентичних параметрах тензорезисторов похибка нуля, обумовлена зміною їх активного опору внаслідок зміни температури балки, буде близьке до нуля, оскільки абсолютні значення збільшень опорів D R1 і D R2 будуть рівні і не викличуть разбаланса мостової схеми, а, отже, і додаткового приросту вихідної напруги U M. З метою зменшення впливу зміни температури навколишнього середовища на чутливість мостової схеми досить часто в якості пасивних плечей мостової схеми R3 і R4 також використовуються тензорезистори, розташовані на об'єкті вимірювання або поруч з ним, але не сприймають вимірюваних пружних деформацій. В інженерній практиці вихідний сигнал з діагоналі неравновесного моста подається на вхід електронного підсилювача, а потім на вимірювальний прилад або реєстратор, в якості якого може бути використаний електромеханічний світлопроменевий осцилограф. На структурній схемі (рис.3) представлені можливі варіанти використання вихідного сигналу бруківці вимірювальної схеми з двома тензорезисторами, включеними в плечі моста з диференціальної схемою. Під дією вимірюваного зусилля деформується пружний чутливий елемент, в якості якого в даній лабораторній роботі використовується балка рівного опору, в інших же випадках це може бути деталь будь-якої форми, на поверхню якої наклеюються тензорезистори.
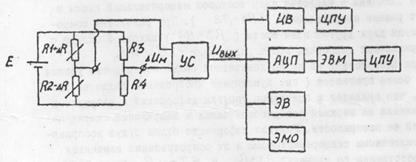
Мал.З.Структурная схема тензометричного вимірювального пристрою. УС - електронний підсилювач (підсилювач постійного струму), ЦВ - цифровий вольтметр, ЦПУ - цифродрукуючий пристрій, АЦП - аналого-цифровий перетворювач, ЕОМ - електронно-обчислювальна машина, ЕВ - електронний вольтметр аналогового типу, ЕМО - електромеханічний світлопроменевий осцилограф Вихідний сигнал бруківці неврівноваженою схеми подається на вхід електродного підсилювача УС з постійним і відомим коефіцієнтом посилення. Вихідна напруга неравновесного моста за умови, що в стані рівноваги опору всіх плечей рівні R 0, а напруга джерела живлення E = const, визначається виразом
де R Н - опір навантаження на виході мостової схеми, тобто вхідний опорів УС; Для переважної більшості підсилювачів постійного струму можна прийняти, що їх вхідний опір R Н >> R 0 тоді на підставі попереднього виразу маємо
Вихідний сигнал підсилювача U ВИХІД (рис.3), що має коефіцієнт посилення по напрузі До У дорівнюватиме
і в залежності від необхідної форми представлення результату вимірювання може бути поданий на вхід різних вимірювальних і перетворюють пристроїв. Для представлення результату вимірювання в цифровій формі U ВИХІД вимірюється цифровим вольтметром ЦВ (рис.3), вихід якого може бути приєднаний до самостійного цифродрукуючий пристрою ЦПУ з метою забезпечення документальної реєстрації результатів вимірювання. У тому випадку, якщо вихідну інформацію необхідно обробляти за заданим алгоритмом, U ВИХІД подається на аналого-цифровий перетворювач АЦП (рис.3), з виходу якого інформативний сигнал у вигляді коду подається на ЕОМ. Оброблені результати експерименту виводяться на цифродрукуючий пристрій ЦПУ. Вихідна напруга підсилювача може бути виміряна аналоговим електронним вольтметром ЕВ. В інженерній практиці найчастіше U ВИХІД фіксується на фотопапері або кіноплівці за допомогою електромеханічного світлопроменевих осцилографа ЕМО. При всьому різноманітті завдань, що вирішуються за допомогою тензорезисторів, можна виділити дві основні області їх застосування. Перша область - застосування тензорезисторів для вимірювання механічних величин (сил, переміщень, тисків), перетворюються в деформацію пружного елемента, величина якої вимірюється за допомогою тензорезисторів. В цьому випадку є можливість індивідуального градуювання тензорезистивного перетворювача, на основі якої будується його градуировочная характеристика. Поточне значення вимірюваної величини визначається з використанням градуювальної характеристики. Похибки вимірювань лежать в діапазоні 0,05% - 0,5%.
Тензорезистори застосовуються для вимірювання як статичних, так і динамічних деформацій. Верхня межа частотного діапазону визначається співвідношенням між базою тензометра l і довжиною хвилі l пружною деформації в матеріалі досліджуваного елемента. Еnо співвідношення рекомендується підтримувати в межах l / l £ 0,1 Практично частота реєстрованих процесів може лежати в діапазоні 0 - 100 кГц. 3.Оборудование, що використовується при виконанні лабораторної роботи.
Рис.4. Структурна схема тензометричної установки для вимірювання зусиль.
Первинний перетворювач УПП в розглянутій установці виконаний у вигляді консольної балки 1 рівного опору вигину (рис.5). Балка рівного опору 1 має постійну товщину і вид рівнобедреного трикутника в плані. При додатку вимірюваного зусилля Р до вільного кінця балки шляхом навішування вантажів 2 на шток 7 остання прогинається. При цьому характерною особливістю балки рівного опору є сталість величини напруги розтягування і стиснення в її зовнішніх шарах по всій довжині балки незалежно від координати X, тобто при певній силі Р в межах 0 <�Х £ l величина напружень в зовнішніх шарах балки буде постійною, що можна записати в вигляді 8.2
де b - ширина балки біля основи (рbс.5); h - товщина балки. Відповідно величина відносної пружною деформації на всьому протягу балки також буде постійною
Знак "+" відноситься до верхнього зовнішнього шару балки, а знак "-" відповідно до нижнього зовнішнього шару балки. Конструктивно балка 1 рівного опору (рис.5) закріплена на торцевій поверхні вертикальної стійки 5, яка в свою чергу жорстко прикріплений до основи 4. У нижній частині основи розташована мініатюрна консольна балка 5. На балках 1 і 5 ближче до
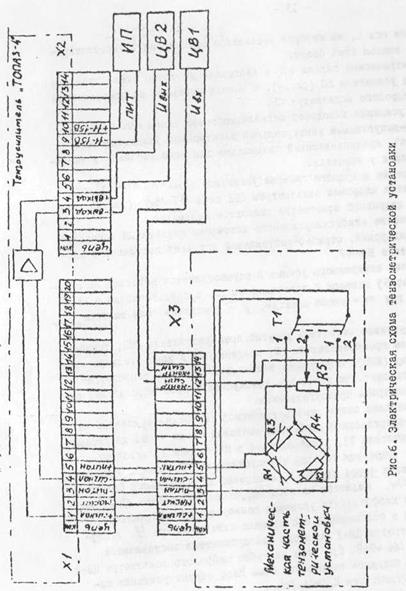
Рис.5. Конструкція механічного вузла тензометричної установки місця закладення зверху і знизу наклеєні металеві дротяні тензорезистори R1, R2 і R3, R4 відповідно, при цьому R1 »R2» R3 »R4» R. Ці опору включені в якості плечей мостової схеми, наведеної на рис.2 і рис.3. Комутація решт схеми виконана на колодці 6, розташованої в підставі 4 (рис.5). Для балансування мостової схеми перед початком вимірювань (тобто для отримання D U M = 0) змінюються величини опорів R3 і R4 шляхом вигину мініатюрної консольної балки 5 (рис.5), за допомогою Електричний сигнал D U M c діагоналі мостової схеми подається на вхід підсилювача УС (рис.4), з виходу якого він надходить ні вхід цифрового вольтметра ЦВ. Для посилення вихідного сигналу мостової схеми D U M застосовуючи серійно-випускається універсальний електронний підсилювач типу "Топаз-4", призначений спеціально для використання в тензометричних установках. Вимірювання вихідного сигналу підсилювача (U ВИХІД = К У D U M) здійснюється цифровим вольтметром ЦВ2 типу В7-16А (рис.4). Показання цифрового вольтметра знімаються візуально. Як стабілізованого джерела живлення ІП використовується стандартний, серійно-випускається джерело постійної напруги типу Б5-47. Створення вимірюваного зусилля Р здійснюється навішуванням на штангу 10 (рис.5) навесок 2 відомої маси, а, отже, і ваги (Р = mg, де m - маса наважки; g - прискорення сили тяжіння Землі). Конструктивно первинний пружний перетворювач УПП, тензометричні перетворювачі ТП, з'єднані в вимірювальну бруківку схему (ІМС), об'єднаний в механічному вузлі тензометричної установки. На рис.4 ця сукупність перетворювачів обведена пунктирний прямокутник. Електрична схема тензометричної установки приведена на рис.6. З вимірювальної діагоналі мостової схеми через двополюсний перемикач Т1, встановлений в положенні 1, вихідний сигнал D U M подається на вхід тензоусілітеля "Топаз-4". З входу тензоусілітеля через клеми 3, 4 роз'єми Х2 вимірюваний сигнал U ВИХІД = К У D U M подається на вхід цифрового вольтметра ЦВ-2. Для регулювання коефіцієнта посилення тензоусілітеля перемикач Т1 ставиться в положення 2 і за допомогою потенціометра У і цифрового вольтметра ЦВ-1 на вході тензоусілітеля виставляється напруга U ВХ = 5мВ. При цьому на табло цифрового вольтметра ЦВ-2 фіксується вихідна напруга U ВИХІД. Коефіцієнт посилення визначається відношенням До УС = U ВИХІД / U ВХ. . Регулювання коефіцієнта посилення підсилювача "Топаз-4" здійснюється обертанням рукоятки "У", розташованої на лицьовій панелі плати підсилювача.
а) потенціометр б) потенціометр "Б" для балансування підсилювального тракту з підключеним до нього датчиком; в) кнопка "М" для включення масштабного сигналу (в лабораторній роботі не використовується); г) кнопка "4,5-9" для установки напруги живлення датчика; утримуючи кнопку встановлюється напруга 4,5 В, а при віджатої -9В; д) кнопки "2-5" для ослаблення вихідного сигналу в 2,5 і 10 разів (в лабораторній роботі не використовуються і знаходяться віджатим стані); е) кнопка "+ -" для перемикання полярності вихідного сигналу тензоусілітеля.
Рис.7. Зовнішній вигляд лицьової панелі універсального електронного підсилювача "ТОПАЗ - 4"
а) кнопка "вкл" для включення напруги живлення, що надходить на "ТОПАЗ-4" від зовнішнього стабілізованого джерела напруги (ІН, рис.4); б) Кнопка "ВД" для включення живлення на мостові вимірювальні схеми, сформовані тензорезисторами R1, R2, R3, R4 (рис.3); в) кнопка "точно" для підвищення чутливості стрілочного приладу, що фіксує вихідний струм тензоусілітеля; г) перемикач "вихід-контроль" для підключення приладу та до виходу одного з трьох підсилювальних трактів (вихід) або для контролю напруги на виході перетворювача (близько 9В) або стабілізатора (П-15В); д) допоміжні гнізда для контролю вихідної напруги на виході комутованого каналу. 4.Методика проведення роботи і обробки результатів експерименту 4.1. Перемикачем на лицьовій панелі стабілізованого джерела живлення ІП виставити напругу стабілізації 15В. 4.2. Зістикувати три розетки роз'ємів, розташованих на кінцях сполучних джгутів, з відповідними частинами відповідних роз'ємів, розташованих на тензоусілітеле "ТОПАЗ-4" (маркування XI і Х2) і на механічної частини тензометричної установки (маркування ХЗ, рис.6). 4.3. Кінці кабелю з биркою "ПІТ", що йде від роз'єму Х2 підключити до вихідних клем стабілізованого джерела живлення ВП. Кінці кабелю з биркою U ВИХІД, що йде від роз'єму Х2 під'єднати до входу цифрового вольтметра ЦВ2; кінці кабелю з биркою U ВХ, що йде від роз'єму ХЗ під'єднати до входу цифрового вольтметрі ЦВ - 1. 4.4. Після перевірки зібраної схеми лаборантом включити мережеве живлення цифрових вольтметрів ЦВ-1, ЦВ-2 і джерела живлення ВП. До подальшого виконання роботи приступити після 15-хвилинного прогріву приладів. 4.5. Відрегулювати коефіцієнт посилення підсилювача До УС = U ВИХІД / U ВХ каналу тензометрического підсилювача "ТОПАЗ-4" в межах 20,5 ± 0,2. Для цього провести наступні операції:
б) тумблер Т1, розташований на підставі механічного вузла тензометричної установки (рис.5), поставити в положення "К У"; в) потенціометром г) потенціометром R5, розташованим на підставі механічного вузла тензометричної установки, виставити сигнал на вході тензометрического підсилювача 6 ± 0,1 мВ, контролюючи його по цифровому вольтметру ЦВ1; д) регулювальним резистором "У", шліц якого розташований на лицьовій панелі першого каналу тензометрического підсилювача, виставити вихідна напруга підсилювача, контрольоване по вольтметру ЦВ-2, відповідне коефіцієнту посилення До У = 20,5 ± 0,2. Увага! Після регулювання коефіцієнта посилення До У в процесі подальшого виконання роботи положення регулювального резистора "У" не зраджувати. 4.6. Перевести тумблер Т1 на механічному вузлі тензометричної установки в положення "ИЗМ", яке відповідає режиму вимірювання. При нульовому значенні вимірюваного зусилля P збалансувати вимірювальну бруківку схему шляхів обертання ручки 9, сидить на осі 8 ексцентрика 7 (рис.5). У разі балансу цифровий вольтметр ЦВ-2, приєднаний до виходу електронного підсилювача УС повинен давати свідчення не більше ± 1 одиниця молодшого розряду на найнижчому межі вимірювання. Остаточну балансування вимірювального тракту зробити обертанням потенціометра "Б" на лицьовій панелі підсилювача. 4.7. Експериментально визначити градуювальну характеристику тензометричної установки, тобто залежність між вихідною напругою і вхідним вимірюваним зусиллям U ВИХІД = Вхідні зусилля задаються навішуванням вантажів відомого ваги. Значення ваги вигравірувано на кожному з вантажів. Навантаження ведеться від 0 до 10 Н з дискретністю 1 Н. Для кожного дискретного ваги фіксується значення вихідної напруги U ВИХІД на цифровому вольтметрі ЦВ2. Результати вимірювань заносяться в табл.1.
Аналогічна характеристика U ВИХІД = 4.8. За отриманими в результаті експерименту даними визначити точки градуювальної характеристики тензометричної установки. Точки градуювальної характеристики визначаються як середнє значення показань цифрового вольтметра при навантаженні та розвантаженні, відповідні кожному фіксованому значенню зусилля (ваги). Наприклад, якщо при впливі сили в 4Н при навантаженні показання цифрового вольтметра 41кв, а при розвантаженні - 43мВ, то точка градуювальної характеристики визначається U ГРАД P = 4 H = (41 + 43) / 2 = 42мВ Значення градуювальної характеристики заносяться в останню колонку табл.1. 4.9. Побудувати графік U ГРАД = За отриманими на графіку точкам провести аппроксимирующую пряму лінію таким чином, щоб вона усереднюються відхилення від неї точок градуювальної характеристики. 4.10. На підставі отриманої апроксимуючої прямої визначити чутливість S тензометричної установки як відношення
де U ВИХІД - приріст вихідної напруги, відповідне збільшенню вхідного вимірюваного зусилля на величину DР. Оскільки в даному випадку апроксимуюча пряма проходить через початок координат, то чутливість тензометричної установки можна визначити як відношення
В останньому випадку значення S визначається з меншою похибкою. Зазвичай в практиці вимірювань аппроксимирующую пряму приймають за градуювальну характеристику. У цьому випадку замість градусника можна використовувати відоме значення чутливості S, обумовлюючи при цьому верхня межа вимірювання по зусиллю P max. 4.11.Проізвесті вимір ваги п'яти деталей, на яких немає гравіювання, що вказує їхня вага. Для цього знову провести перевірку і в разі необхідності регулювання коефіцієнта зміцнення підсилювача (см.пл.5.), Потім збалансувати вимірювальну бруківку схему (п.п.6.). Зафіксувати в табл.2 показання цифрового вольтметра після навішування вантажів невідомого ваги. Визначити ваги вантажів, використовуючи відношення P = U ВИХІД / S, і занести їх в колонку 4 табл.2. 4.12. За графіком U ВИХІД =
апроксимуючої прямей і обчислити відношення
4.13. Всі проведені вище обчислення можна виконати на ЕОМ типу "СМ-4", викликавши програму "KAR 005.BAS" .За введеним результатами експерименту ЕОМ видає значення точок градуювальної характеристики, визначає рівняння регресії (апроксимуючої прямої), чутливість тензометричної установки, наведену похибку апроксимації , а також вага невідомих вантажів. Всі ці дані виводяться на екран дисплея і повинні бути зафіксовані в звіт. Алгоритм виконання програми аналогічний алгоритму ручної обробки даних. 5. Вимоги до техніки безпеки при виконанні лабораторної роботи 5.1. Включення в мережу всіх використовуваних в лабораторній роботі приладів і зібраної схеми можна робити тільки з дозволу лаборанта або викладача після перевірки ними підготовлених до включення приладів і схеми. 5.2. У разі виявлення порушення цілісності ізоляції проводів, іскріння в розетках мережі і вилках кабелів живлення припинити виконання роботи, вимкнути всі прилади і звернутися до лаборанту або викладачеві, який проводить лабораторні заняття. 5.3. Категорично забороняється включати в мережу і користуватися приладами в разі порушення цілісності проводів заземлення їх корпусів. 6. Вимоги до звіту 6.1. Звіт поміщається в зошит, призначену для виконання циклу лабораторних робіт з дисципліни. 6.2. У звіті повинні бути поміщені: - ескіз конструкції механічної частини тензометричної установки із зазначенням місць розміщення тензорезисторів (дається одна проекція - вид збоку); - структурна схема тензометричної установки; - таблиця даних, необхідних для визначення градуювальної характеристики (табл.1); - графік з точками градуювальної характеристики і з апроксимуючої прямої; - формула для визначення чутливості тензометричної установки і значення чутливості, певне з використанням апроксимуючої прямої; - таблиця експериментальних даних і результатів розрахунку визначення ваг невідомих вантажів; - розрахункову формулу і значення складової зведеної похибки, обумовленої аппроксимацией градуювальної характеристики. Графік градуювальної характеристики і апроксимуючої прямої будується на міліметровому папері з масштабами по осі абсцис 10 мм = 1Н по осі ординат 10 мм = 1В. 7. Питання для підготовки до захисту лабораторної роботи 7.1. У чому полягає сутність явища тензоеффекта? 7.2. Дати визначення коефіцієнта тензочутливості тензорезисторного перетворювача. 7.3 Конструкція тензорезисторного перетворювача. 7.4. Матеріали, з яких виготовляється чутлива частина тензорезистора. 7.5. Схеми включення тензорезисторних перетворювачів. 7.6. Структурна схема тензометричної установки. 7.7. Методика визначення коефіцієнта посилення тензометрического підсилювача. 7.8. За рахунок яких "елементів балансується бруківка вимірювальна схема? 7.9. Методика визначення чутливості тензометричної установки. 7.10. Методика визначення ваги невідомих вантажів. 7.11. Чому виникла необхідність живити бруківку вимірювальну схему від стабілізованого джерела напруги? 7.12. Яким чином потрібно поставити експеримент, щоб визначити вплив коливань напруги джерела, яке живить бруківку вимірювальну схему? 7.13. Чи можна за допомогою розглянутої тензометричної установки вимірювати величини періодично змінюються зусиль? 7.14. Чим відрізняються реальна градуировочная характеристика від номінальної, за яку приймається апроксимуюча пряна? 7.15. Яким чином оцінюється складова зведеної похибки, обумовлена похибкою апроксимації градуювальної характеристики прямою лінією? 8. Література 8.1. Левіна Е.С., Новицький П.В. Вимірювальні перетворювачі. - Л .: Вища школа, 1980. 8.2. Проектування датчиків для вимірювання механічних величин. Є.П. Осадчий, А.І. Тихонов, В.І. Карпов та ін. Під ред. Є.П. Осадчого. - М .: Машинобудування, 1979. Укладач к.т.н.доцент Е.А. Карцев Рецензенти: к.т.н.доцент Г.Д. Коренев к.т.н.доцент В.К. Ваганов |
||||||||||||||||||||||||||||||||||
 (1)
(1) (2)
(2) (4)
(4) - значення відносної
- значення відносної  - значення відносної поперечної деформації;
- значення відносної поперечної деформації;
 (5)
(5) . Коефіцієнт тензочутливості K
. Коефіцієнт тензочутливості K  (6)
(6) , то
, то  .
.
 (8)
(8) відносна зміна опору кожного з тензометрів.
відносна зміна опору кожного з тензометрів.
 тобто між вимірюваної деформацією (зусиллям), що викликає зміну опору тензорезисторів зі значення R 0 = R 1 = R 2 до значень R 0 ± D R, і вихідною напругою мостової схеми існує практично лінійна залежність.
тобто між вимірюваної деформацією (зусиллям), що викликає зміну опору тензорезисторів зі значення R 0 = R 1 = R 2 до значень R 0 ± D R, і вихідною напругою мостової схеми існує практично лінійна залежність. (10)
(10)








 Друга область застосування - дослідження деформацій і механічних напружень в деталях і елементах конструкцій.
Друга область застосування - дослідження деформацій і механічних напружень в деталях і елементах конструкцій. 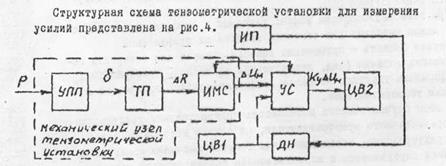












 Р - вимірюваний зусилля (вага); УПП - пружний первинний перетворювач сили Р в величину пружної деформації; ТП - тензорезисторний перетворювач величини пружної деформації в відповідне значення збільшень активного опору тензорезисторів; ІМС - вимірювальна бруківка схема; DU - вихідна напруга з діагоналі І.МС; ІП - стабілізований джерело живлення; УС - електронний підсилювач постійного струму з коефіцієнтом посилення К У, ЦВ1 і ЦВ2 - електронні цифрові вольтметри; ДК - дільник напруги, що використовується для визначення значення коефіцієнта посилення підсилювача УС.
Р - вимірюваний зусилля (вага); УПП - пружний первинний перетворювач сили Р в величину пружної деформації; ТП - тензорезисторний перетворювач величини пружної деформації в відповідне значення збільшень активного опору тензорезисторів; ІМС - вимірювальна бруківка схема; DU - вихідна напруга з діагоналі І.МС; ІП - стабілізований джерело живлення; УС - електронний підсилювач постійного струму з коефіцієнтом посилення К У, ЦВ1 і ЦВ2 - електронні цифрові вольтметри; ДК - дільник напруги, що використовується для визначення значення коефіцієнта посилення підсилювача УС.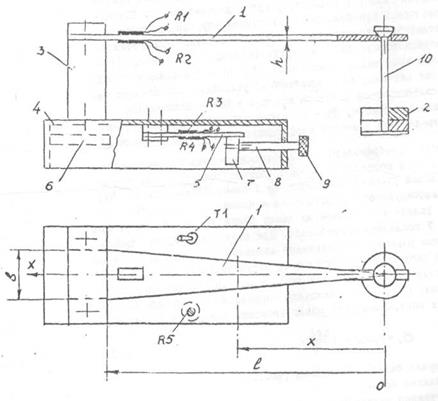










 На рис.7 показаний зовнішній вигляд лицьової панелі універсального електронного підсилювача "Топаз-4". Призначення елементів, розташованих на панелі підсилювального каналу:
На рис.7 показаний зовнішній вигляд лицьової панелі універсального електронного підсилювача "Топаз-4". Призначення елементів, розташованих на панелі підсилювального каналу: установки нуля на виході підсилювача;
установки нуля на виході підсилювача;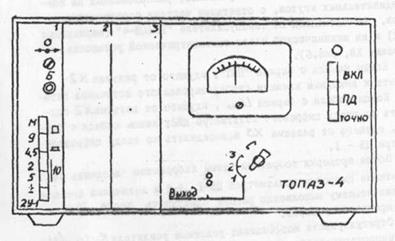
 На передній панелі блоку живлення тензоусілітеля "ТОПАЗ-4" розташовані:
На передній панелі блоку живлення тензоусілітеля "ТОПАЗ-4" розташовані:









 а) подати харчування на тензоусілітель "ТОПАЗ-4", натиснувши кнопку "ВКЛ" на його лицьовій панелі; при цьому повинна загорітися сигнальна лампочка, розташована над кнопкою; перемикач "контроль-вихід" поставити в положення 1;
а) подати харчування на тензоусілітель "ТОПАЗ-4", натиснувши кнопку "ВКЛ" на його лицьовій панелі; при цьому повинна загорітися сигнальна лампочка, розташована над кнопкою; перемикач "контроль-вихід" поставити в положення 1; , Шліц якого виведений на лицьову панель першого каналу тензометрического підсилювача, усунути похибка нуля підсилювача, що відповідає нульовим показаннями цифрового вольтметра ЦВ-2; подати харчування на бруківку вимірювальну схему, натиснувши кнопку "ПД" на лицьовій панелі блоку живлення тензометричної установки;
, Шліц якого виведений на лицьову панель першого каналу тензометрического підсилювача, усунути похибка нуля підсилювача, що відповідає нульовим показаннями цифрового вольтметра ЦВ-2; подати харчування на бруківку вимірювальну схему, натиснувши кнопку "ПД" на лицьовій панелі блоку живлення тензометричної установки; (P) впливає на кінець консольної балки установки.
(P) впливає на кінець консольної балки установки. (P) знімається при розвантаженні установки від 10 Н до про Н з дискретністю 1 Н.Результати вимірювань також поміщаються в табл.1.
(P) знімається при розвантаженні установки від 10 Н до про Н з дискретністю 1 Н.Результати вимірювань також поміщаються в табл.1. (Р). Масштаб графіка повинен бути таким, щоб сила в 1Н займала на осі абсцис не менше 10 мм, а напруга U ГРАД = 10 мВ займало на осі ординат також не менше 10 мм.
(Р). Масштаб графіка повинен бути таким, щоб сила в 1Н займала на осі абсцис не менше 10 мм, а напруга U ГРАД = 10 мВ займало на осі ординат також не менше 10 мм. [МВ / Н],
[МВ / Н], [МВ / Н].
[МВ / Н]. (P) визначити складову зведеної похибки вимірювання, обумовлену аппроксимацией градуювальної характеристики прямою лінією. Для цього необхідно визначити максимальне за абсолютною величиною відхилення градуировочной точки від
(P) визначити складову зведеної похибки вимірювання, обумовлену аппроксимацией градуювальної характеристики прямою лінією. Для цього необхідно визначити максимальне за абсолютною величиною відхилення градуировочной точки від
- 1. Мета роботи, її короткий зміст
- 2. Основні відомості про тензорезисторами
- 3.Оборудование, що використовується при виконанні лабораторної роботи.
- 4.Методика проведення роботи і обробки результатів експерименту
- 5. Вимоги до техніки безпеки при виконанні лабораторної роботи
- 6. Вимоги до звіту
- 7. Питання для підготовки до захисту лабораторної роботи